21_Sokol1 wrote:
Se for no gimbal do joystick, não vejo como - pois precisa entender que o "prato oscilante" dele balança num plano "3D" (horizontal/vertical) e não apenas em "2D", que seria necessário para girar uma engrenagem.
Aproveitando uma discussão do DCS sobre gimbal com uma mola x duas molas para o
"feel simulator" deles.
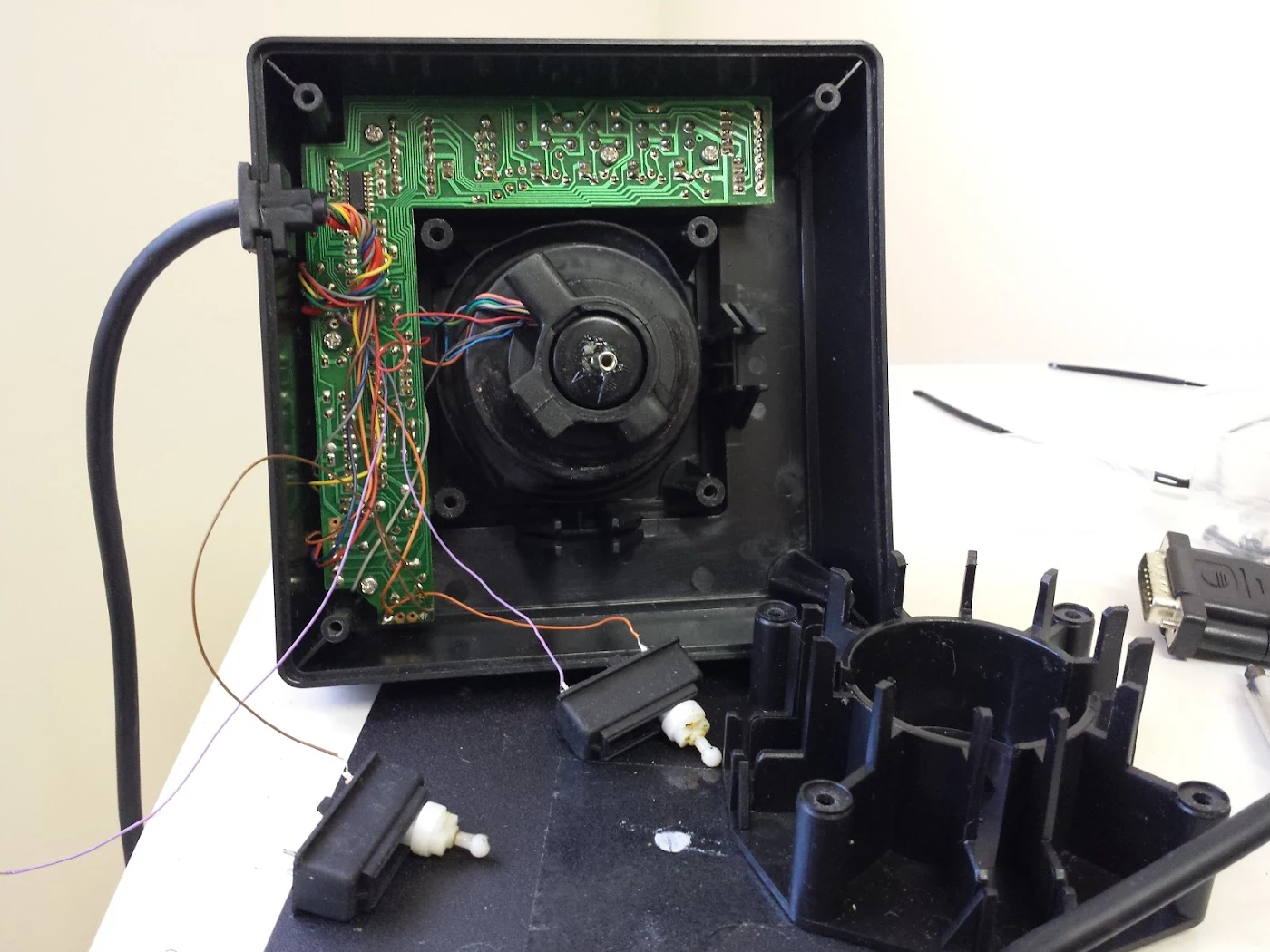
Mais ou menos o que acontece no gimbal - uma mola - do Suncom é isso:
 upload gif from url
upload gif from url
Quando inclina o grip - por exemplo picando (Y) - o prato oscilante inclina e move a bola vermelha na cabeça do pot no eixo Y, gerando o comando só no profundor - 2ª figura.
Ao mesmo tempo esta inclinação faz o prato girar em volta da cabeça do pot' do eixo Y, o azul, que fica no mesmo lugar.
Agora, se quiser manter picando (Y) e comandar aileron para a direita (X), o prato fará a bola azul subir, e ao mesmo tempo vai girar em volta da bola vermelha (Y) mantendo posição do profundor.
Isso na teoria, porque na prática esse sistema acaba misturando um pouco os eixos, caracteristica não desejável num vôo de precisão.
Outro ponto negativo disso - presente também no sistema Saitek e Tm Warthog, T.1600M:
Suponhamos que a força para cabrar (Y) seja 10N, necessários para comprimir a mola helicoidal do gimbal.
Porém quando comandar o aileron (X) a
força necessária será próxima a zero (0) N, pois a mola já esta comprimida e não os 10N que seria se comandasse apenas aileron. Isso tende a gerar comando exessivo no segundo eixo, pois a mão não sentira a esperada resistência da mola no segundo comando.
Confirmei isso num Saitek Cyborg aqui. Claro que para muitos na prática acostuma-se com isso e nem percebe o "defeito".

É o que os gringos estão brigando no tópico, sobre o gimbal do Warthog não prestar (para alguns) para vôo de precisão (ex. reabastecimento em vôo) devido a mistura de eixos, cancelamento de forças.
http://forums.eagle.ru/showpost.php?p=2 ... count=1286
A terceira figura (à direita no desenho) é o que eu tinha pensado como alternativa para o Suncom, transformar o movimento sobe/desce da bola numa inclinação e assim girar um imã no eixo deste braço, mas os diferentes comprimentos de alavancas vão gerar diferente velocidade angular... Tem testar na prática, o que involve criar um sistema mecânico para isso...
E, isso não quer dizer que um sistema com duas molas - uma para cada eixo X,Y (ex. gimbal CH, VKB Gladiator) seja perfeito - pois este sistema gera um "clunck"* acentuado ao passar pela posição central - quando molas ficam em repouso - (também aconteçe com uma mola só) e se torna mais pesado nos movimentos em diagonal, pois estará movendo o grip contra a força de duas molas.

* O uso de CAM nos gimbal BAUR, VKB (MFG, SLAW) minimiza esse "clunck", dependendo do perfil da CAM usada.